30. 深度学习进阶 - 池化

Hi,你好。我是茶桁。
上一节课,我们详细的学习了卷积的原理,在这个过程中给大家讲了一个比较重要的概念,叫做input channel,和output channel。
当然现在不需要直接去实现, 卷积的原理 PyTorch、或者 TensorFlow 什么的其实都实现了。但我们现在如果要用 PyTorch 的卷积操作,它就会有一个 input channel 和 output channel 的一个写法。
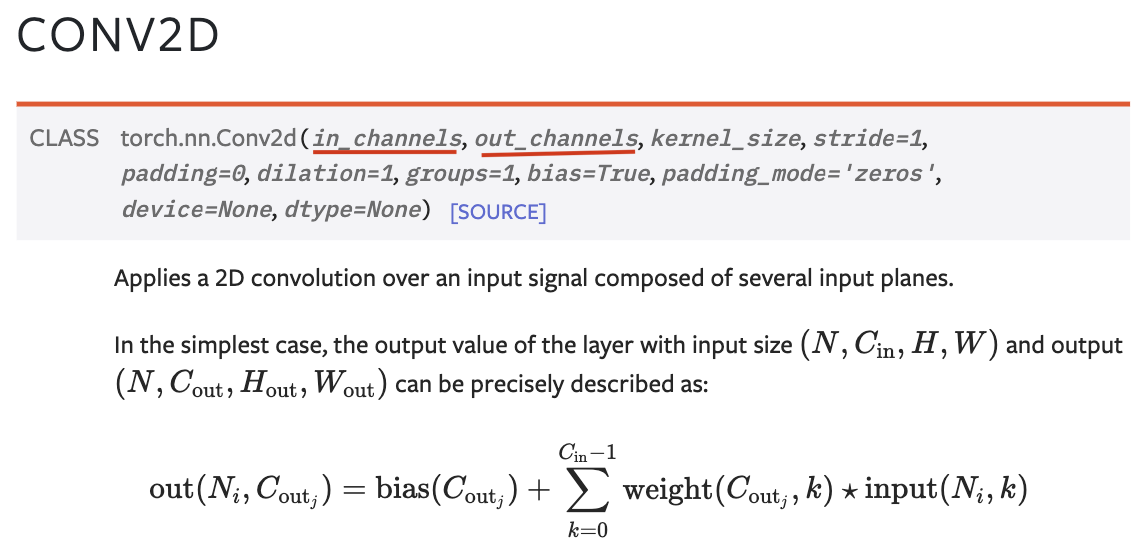
这里的方法是Conv2d,表示这里所应用的 filter 是一个 2d
的。那么它如何去做 3d 的? 是将每一层的结果加在一起。
与此对应的还有一个Conv3d, 这个时候 filter
就是很多个不一样的。
我们一般在使用的时候,应用的都是Conv2d。感觉上好像觉得
Conv3d 里,我们每一层的值不一样其实会更好。但其实现在得到的这个 filter
是咱们人工写的,但是我们为了提取出来大自然中非常非常多的特征,其实我们会让机器自动生成、自动初始化一堆
filter,这些 filter 的结果全部都是随机的。
就是说,这个 filter 的结果在深度学习中其实这些结果都是随机的,然后通过训练和反向传播,这些 filter 会自动地学习出来一个值。也就是说它会自动地收敛到某个数值上,而这个数值在这种环境下卷积应该怎么提取特征,那么我们做成 2D 的话所需要拟合的参数其实就少了。
假如 filters 前边的 input channel 很多、很深,那么这个 filters 需要拟合的参数也很多,如果是 2D 的话,只需要拟合 2D 的这一层就可以了。这就是 2D 和 3D 的区别,以及为什么一般要用 2D 不用 3D。
如果现在要用卷积的话,第一个参数就是 input channel。第二个就是 output channel。output channel 其实就是有多少个 filters。
那 kernel size 指的就是做卷积的时候这个卷积的大小。比方说是 3 * 3 的,那么 Kernel size 就是 3,也可以写成(3,3)。
还有一个参数叫做 stride,这个 stride
就是步幅。那这个步幅是干什么的?我们一般用 filter
去卷积图像的时候,在矩阵上是一个单位一个单位从左到右从上到下移动的,这个步幅是为了加快移动,从而设置的间隔。比如[10, 9, 8, 7, 6],
那我就拿一行来举例,知道意思就行了。比如这样一个数列,如果 filter 是 3
列,那按顺序就应该先是[10, 9, 8],然后是[9, 8, 7],
但是我设置了 stride
就可以跳步来执行。在[10, 9, 8]之后,可以是[8, 7, 6]。stride
默认为 1。
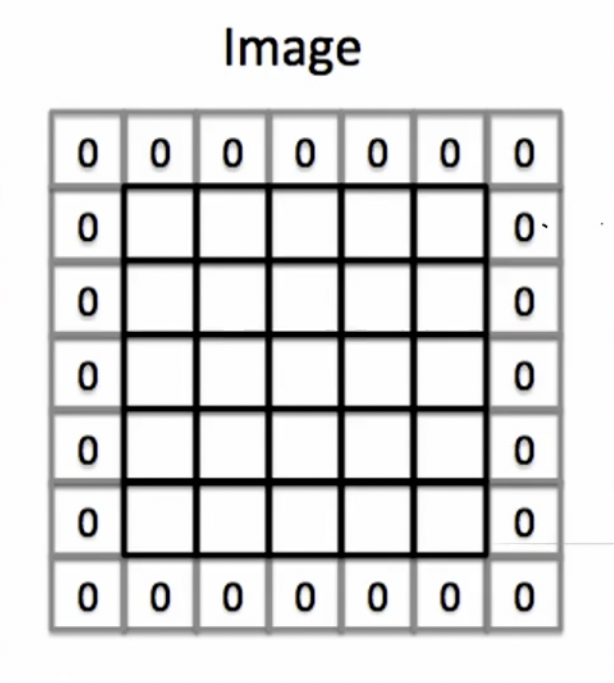
下面一个参数, padding。假如是一个 6 * 6 的图像矩阵,有一个 3 * 3 的 filter, 那么对这 6 * 6 的图像进行卷积,会先变成一个 4 * 4,然后变成 2 * 2。显示出来的结果就是在不断地变小,代表抽象层次越来越高。
那么因为每一次 window 都在不断变化,在进行下一轮的时候,如果这中间要加一些什么操作,维度发生变化,会导致每一次中间要连接什么东西的时候维度都得重新去计算。
也就说维度不断的变化,会导致写代码的时候计算会变得更复杂。
那第二,就是我们也不希望减少的太快了。举个极端情况,把 1 万 * 1 万的图像很快就变成一个 2 * 2 的了。抽象层次太高信息就少了。
第三个解释起来比较复杂,我们脑子里想想一下,一个 filter 在图像上进行从左到右移动,那么在依次进行卷积计算的时候,最左边的一列就只计算了一次,但是中间位置就会被卷入计算多次。我们希望的是边上的的数据也能被计算多次,就是也能被反复的提取。
要解决这三个问题有一个很简单的方法,就是
padding。它的意思就是在这个图形外边加了一圈或者两圈 0。如果你要加一圈 0
的话,padding=1。如果等于 2 的话,就加两圈 0。
接下来,dilation。这个是在我们做图形的分割的时候用的。在图形识别的时候大家现在先不用去学习它。
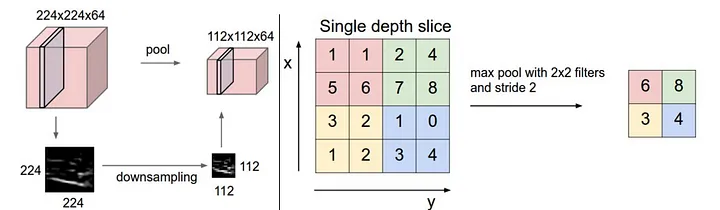
我们一张图片进行卷积的时候,会越来越小,这个叫做下采样, down
sampling。进行完下采样之后,如果要做图像的切分,我们要把图像里边主体部分全部给它涂黑,别的地方全部涂白,需要基于这个小的采样又把它给扩大,慢慢恢复到原来大小,这个叫做上采样。上采样时,有时候会用到dilation。
重要的就是这几个参数。这几个参数给大家说完,其实基本上卷积的几个重要的特性就说明白了。
池化
除了卷积之外,还有一个比较重要的操作: pooling,
池化操作。
池化操作其实很简单,我们给定一个图片,卷积操作是选了一个 window 和
filter,做了一个 f 乘 w 然后给它做相加. sum(f*w). pooling
是一个很直接的操作, 把 w 这里边所有的值给它取个平均值,
也有可能取个最大值。假如是它最大值,那么值最大就代表着是在这个图形里边对他影响最重的这个点。
那么做了 pooling 之后,每一次这样一个操作,图形变小了,但是图像基本上保持了原来的样子。就是 pooling 操作前后的图像是相似的,它取了最重要的信息。
我们现在来思考一下,如果有一个图片,不管是卷积还是 pooling 都会让其缩小。那我们思考下, 既然两个操作都会导致图像缩小,那为什么会存在两个操作呢?
咱们机器学习里面最头疼的事情就是所谓的过拟合,过拟合就是在训练的时候效果挺好,结果在实际中效果就不好了。
而控制过拟合最主要的就是能够减少参数,在越少的参数能达到效果的时候,我们期望参数越少越好,在同样的数据量下就越能防止过拟合。
卷积里面这些值以前的时候是人来确定,但现在其实是期望机器自动的去求,也就是说这个参数是需要自己去求解的。而 pooling 并不需要去设定参数,它没有参数,这样会减少参数。
用了 pooling 之后不仅减少了参数, 还减少了接下来 x 的维度。所以最核心的其实是我们减少了所需要训练的参数。
之所以用 pooling 是因为可以减少参数,可以让它的过拟合的问题减弱。但是如果你的数据量本身就很多,或者说模型本身就比较好训练、好收敛,那你没有这个 pooling 操作其实也是可以的。
权值共享和位置平移
那么这个时候就要跟大家来讲一个比较重要的概念,叫做权值共享和局部不变性:
Parameters Sharing and Location Invariant.这个 Loction
Invariant 也有人把它叫做 shifting Invariant。CNN
的最重要的两个特点,第一个特点就是它的权值共享。
我们给定一个图片,就之前我那个头像,假如有一个 filter,它是 3 * 3 的,那么这 3 * 3 的这个网格它在每一个窗口上都是和这个 filter 做的运算。
那么大家想一下,假如有一个 1,000 乘以 1,000 的一个图形,我们这 1,000
* 1,000 的图形我们要把它写成wx+b的话,这个 x 是 100
万维的,那么这个 w 也是 100 万维的。
那么如果我们要做训练的话,就要训练 100 万个 w。这是拟合一个线性变化,那么我们如果现在是要去拟合一个卷积,假如 output channel 是 10,那我们需要拟合的参数是多少?
卷积核是 3 * 3, 有 10 个。 那就是 9 * 9 再乘以 10。不管这个地方是 1,000 * 1,000 还是 1 万 * 1 万,我们要拟合的都是卷积核里的这个参数。
我们做一层卷积,哪怕给了 10 个卷积核,也是九十个。如果要给它做一层线性变化,得 100 万个,这两个相差特别大。
为什么相差这么大?是因为不同的位置上用的 filter 的值是一样的。filter 的参数整个图像共享了。这就是卷积神经网络的权值共享。
那么我们现在想一下,我们有了这个 Parameters Sharing,它的作用是什么?
减少参数量的作用是防止过拟合,防止过拟合的最终体现就是我们在各种计算机视觉上的任务,表现就好。除此之外还有一个特性,它可以大大的提升我们的计算速度。
本来我们以前如果你有这么多参数的话,要反向传播一次要进行 100 万个反向传播。现在我们只要进行九十个就行了。
所以权值共享其实是卷积神经网络为什么效果特别好的原因。
2012 年的时候,计算机视觉的测试效果一下子有了突飞猛进。当时就是因为用了卷积神经网络。
以前大家在实验室环境下,在训练集上的效果都挺不错,但是一拿到测试集的时候效果就很差。后来用卷积神经网络之后,这个错误率一下就下降了。
权值共享这个特性因此带来了一个特点,就是 Loction Invariant。就是一个局部的东西,我们把它信息连接在一块了。
我们分别有两张图片,比如下面这张我以前画的一幅画,我把构图分别改变一下。
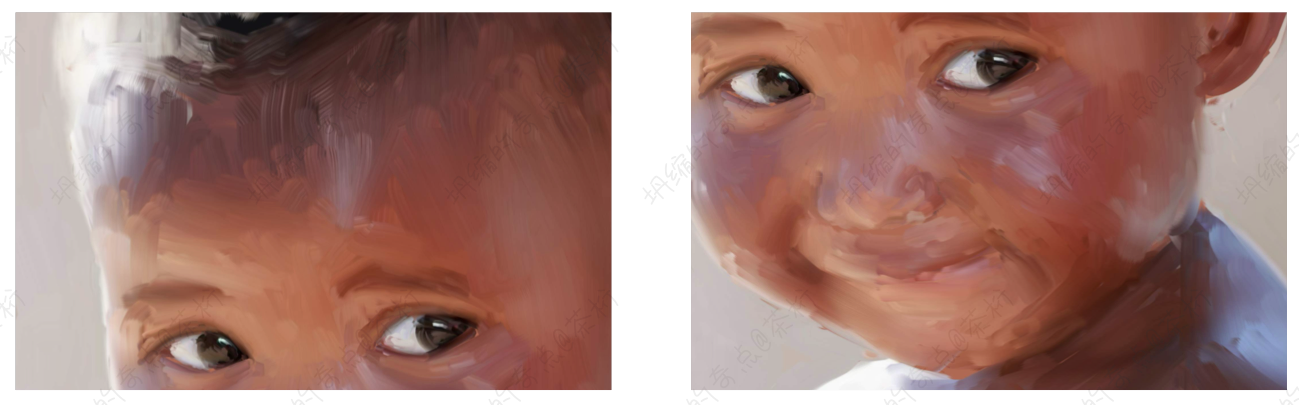
这两个图像数据表征上是很不一样,但是眼睛所在的位置经过卷积之后,只要用的是同一个卷积核,产生的结果是相似的。所以这个 Loction Invariant 指的意思是,不管这个眼睛在哪我们都能提取出来。
假设我们在 train 的时候, 眼睛不管在哪,只要把这个 filter 训练出来了,在 test 数据集上就算它的位置变了我们依然能够提取出来它的特征,依然能够计算出来和它相似的这个值,这个就叫做 Loction Invariant。
这两个特性是极其重要的。
搭建卷积神经网络这个事,说实话最主要的还是要看经验。那么前人的总结就很值得借鉴,下节课,我们就来看看几种经典的神经网络结构。
30. 深度学习进阶 - 池化

